


epi.38- makeup class

38.宇宙考証
本講は同作の核心部分に関するネタバレを含みますので,必ず同作の本編を完結させた方のみごらんください.
安全のため十分な空行を入れますので,自己責任においてスクロールしてください.
ネタバレ回避の空行
ネタバレ回避の空行
ネタバレ回避の空行
ネタバレ回避の空行
ネタバレ回避の空行
38.1.重力が0.17Gに…
まず世界がどのような状況であるかを説明します.
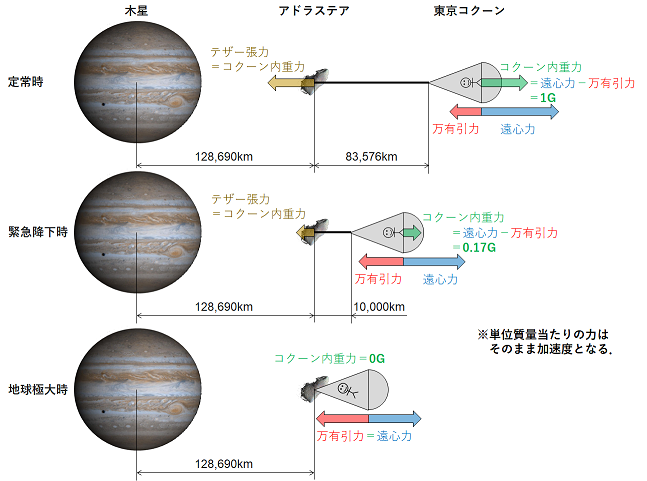
コクーン群は地球ではなく,木星を周回する衛星に繋留されています.
特に,東京コクーンはアドラステアに,国連大学コクーンはメティスに繋留されていると設定しました.
コクーンは木星の万有引力を受けつつ,衛星によって振り回されるので遠心力が働きます.
(なお,万有引力は実在の力ですが遠心力は見かけの力(慣性力)であって,慣性系にあるならば後半は「衛星の公転によってテザーが引っ張られることでコクーンに向心力が働く」となります.しかし向心力よりも遠心力を持ち出した方がイメージしやすいと判断しました.)
遠心力は木星に近付くほど小さくなり,一方で木星の万有引力は木星に近付くほど大きくなります.遠心力の方が大きければテザーには張力が働いて,テザーが(揺れることはありますが)ピンと張られた状態になります.
定常時はテザー伸展長を調節することでコクーン内の重力は1Gに保たれています.このコクーン内重力は,遠心力と木星の万有引力との差分,言い換えればテザー張力に起因しています.
地球極大時はテザーを全て巻き取ることで衛星の近傍まで接近しています.衛星は遠心力と木星の万有引力とが釣り合った結果,ケプラー運動をしています.コクーンもまたこの位置では同じように遠心力と木星の万有引力が釣り合うため,コクーン内重力はほぼ0Gとなります.
木星の重力定数を \({\mu}_J = 1.267{\times}10^8 \mbox{km}^3/\mbox{s}^2\) とし,アドラステアの公転半径を \(r_a = 128,690 \mbox{km}\),公転角速度を \({\omega}_a = 2.438{\times}10^{-4} \mbox{rad}/\mbox{s}\) とすれば,緊急降下時に衛星からテザー繋留によって \(10,000 \mbox{km}\) にあるコクーン内重力は,
となります.
これは地球表面の重力の約1/6で,ほぼ月の表面での重力と同じ程度です.
従って,このときのアラタの移動はひょいひょいと楽なものであったと思われます.
38.2.エマスト・逆行手順
Emergency stop!!に「エマスト」というルビが振られていますね.
「エマスト」は宇宙業界の隠語で,文字通り,異常が認められたときにその発見者によって発せられる言葉です.
エマストが宣言されたら直ちに安全な状況が確実に確保されるために,関係各所の担当者はそれまで進めていた手順書に記載の手順を止め,担当の範囲内で安全側への設定を次々に行っていきます.
この安全側への設定を次々に…の手順は,順調であれば進めるべきところを戻していることになるので「逆行手順」と言い,手順書と共に逆行手順書が傍らに置かれているものです.
例えばこのコマでしたら,ミサイルを発射するために順行して手順を進めていたところにソウイチロウによってエマストが宣言されました.
これを受けて,例えばミサイルが点火されないように点火系の電源を落とすとか,ランチャーからミサイルが飛び出さないように機体を保持するとか,核爆弾が起爆しないように停止信号を送るとか,などを逆行手順に従って順次行います.
しかしながら,エマストのタイミングによっては関係各所の逐次的な対応では間に合わない場合もあります.そのようなときのための逆行手順の最後の手段として,ソウイチロウは全コクーンの強制電源遮断を実施しました.
38.3.コクーン内の明るさ
コクーン内が停電になって,ジラフが冒頭のようなことを言いました.
この台詞は,まず太陽を光源とした光束が木星に到達して木星を照らす照度を求め,木星のアルベドを考慮したものを以て木星を光源と見なしてコクーンを照らす照度を求める,という計算に基いており,このときのコクーンは30W蛍光灯を2灯使用しているときの八畳間程度の明るさとなります.
太陽光は距離の二乗に反比例して弱くなりますが,木星が大きいこととコクーンが木星の近傍にあることから,ジラフが「なかなかあかるい」と感じるのには十分と言えます.

窓から差し込む光によって照らされる人々とその影からは,不気味さをも感じさせる非日常感が伝わって来ますよね.
38.4.木星トロヤ群の襲撃
現在,物理学による現象の表現及び解析の手段は,まず微分方程式を立てることから始めるのが主流です.
この宇宙に2つの物体だけが存在しているとする「二体問題」であれば,それらの物体の運動に関する微分方程式はきちんと解くことができて,物体の運動を過去から未来まで全て追跡できる数式を得ることができます.
ところがこれに第3の物体が介入した「三体問題」では,微分方程式は立てられますが,一般にはこれを解いて物体の運動を数式として記述することはできません.
これを「解析的に解けない」と言います.
このことはアンリ・ポアンカレによって「ポアンカレの定理」として示されました.
なお,微分方程式を解析的に解けなくても,数値計算によって解くことは可能です.
これを「数値的に解く」と言います.
数値的に解くことはできるので,微分方程式を記述できれば,コンピュータを使って数値シミュレーションを行うことは可能です.
ところでこの3つの物体の内の一つがとても軽いときに限っては「制限三体問題」となって,微分方程式を解析的に解くことができるようになります.
さらに,残り二つの物体が両者の重心位置を中心として円運動をしているときは「円制限三体問題」として扱えるようになります.
以下に筆者の提供する講義の資料で簡単に説明します.
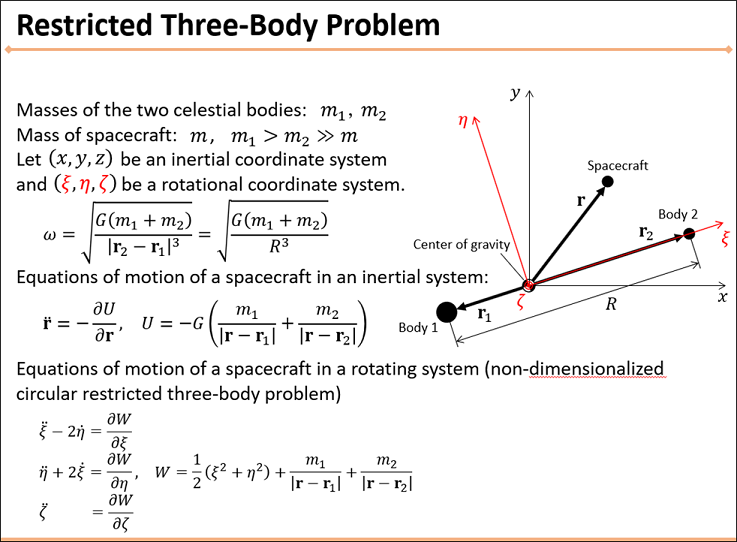
上図において,例えばBody 1を地球(又は太陽),Body 2を月(又は地球)としたときの地球-月系(又は太陽-地球系)における宇宙船(Spacecraft)の運動を求めることができます.
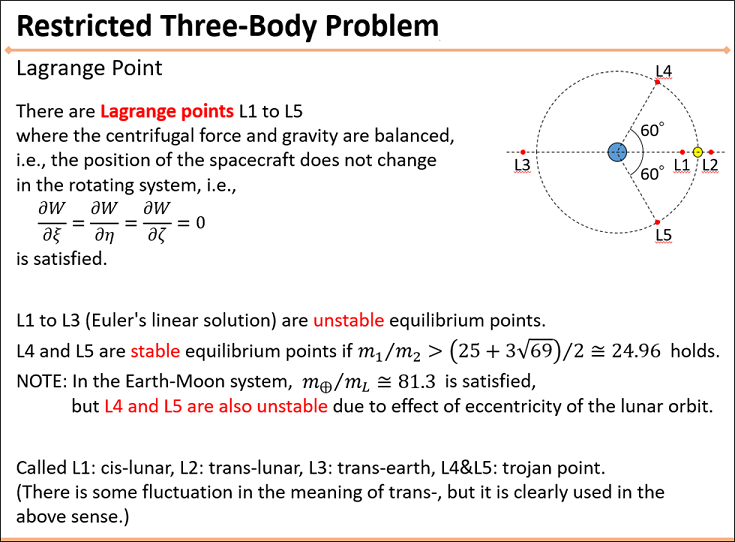
それでですね,こんな式をちょちょいといじりますと上図に示すような「その場所に居るとずっとその場所に居続けられる位置」,即ち「平衡点」が5つ求まります.
この5つの点を「ラグランジュ点」と言い,上図の位置でL1~L5(直線解:L1~L3,三角解:L4~L5)で示した場所になります.
L1~L3については,その場所から少しでもずれるとどんどんずれていってしまうという不安定な場所です.これを「不安定平衡点」と言います.
L1点を含む地球-月間は「シスルナ」,L2点を含む領域は「トランスルナ(但し定義の揺れあり)」,L3側は「トランスアース(但し余り呼称されない)」と呼ばれます.
「機動戦士ガンダム」では地球-月系でのL2(EML2)に「ルナツー」が配置されていました.
一方,L4とL5は,Body 1とBody 2の質量割合や実際の軌道の円からの外れ具合についてある条件を満たしたとき,その場所から少しずれても自然とまた元の場所に戻るという安定な場所となります.これを「安定平衡点」と言います.
「シン・エヴァンゲリオン劇場版:||」では,AAAヴンダーから種子カプセルがEML5に向けて発射され,また途中でEML2を経由する場面が描かれていました.
L4とL5は「トロヤ点」と呼ばれています.
元々は太陽と木星についてのL4及びL5の当たりにある小惑星の一群にトロイア戦争の英雄の名前が付けられたことからこれを「トロヤ群」と名付けたことに由来しています.
実際には各ラグランジュ点そのものに物体を配置させるということは余り行われず,その点の近傍を周回する「ハロー軌道」などの比較的安定な軌道が選ばれることが多いです.
ハロー軌道は唯一存在するものではなく,そのラグランジュ点周辺で多様体を形成します.
例えば今後建設が検討されている「月軌道プラットフォームゲートウェイ(LOP-G)」は,EML2周りのハロー軌道の一群の内,まるで月周回軌道にあるかのようなNRHO(Near Rectilinear Halo Orbit)というハロー軌道が採用される予定です.
イメージして頂くためにこちらの動画をごらんください.
冒頭から0:25秒辺りまでに,地球-月系のL2(EML2)周りにあるハロー軌道の一群が描かれます.そして最も月に使いところにある細長い楕円がNRHOです.
0:26~0:40はDistant Retrograde Orbits(DRO)という軌道なのでここは一旦飛ばして頂いて…
0:40~0:45にEML2から派生したNRHOの一群が描かれています.
0:46~0:55では,EML1とEML2から派生したNRHOの群が描かれています.
0:56~1:06はちょっと飛ばしまして…
1:07からはNRHOにある宇宙機の運動を赤い線で描いています.左図は慣性系から見た様子で地球は中央に固定されて月がその周囲を公転し,宇宙機が地球と月の重力を受けて月軌道辺りをうろうろしています.右上は地球から月を見ている人にとって宇宙機がどのように見えるかを示したもので,まるで月周回軌道を回っているかのように宇宙機が月の周囲を回っています.
月の重力場はとても歪なので,月周回軌道にある衛星はかなり短期間で軌道が大きく変わってしまったり月へ墜落してしまったりします.これを回避するために,月周回軌道ではなくNRHOを採用します.
さらに,NRHOは地球や月との往来が比較的容易であるとか,熱環境や通信環境が大きく変化しないとかなどのメリットもありますので,今後のシスルナ/トランスルナの空間の開拓ではラグランジュ点周りのハロー軌道の奪い合いが起こるのかも知れません.
本作で地球がやられた原因である木星トロヤ群ですが,木星トロヤ群は木星軌道上のトロヤ点に安定して分布しています.その数,直径1km以上のものに限っても両点合わせて100万個以上と言われています.
本作では木星トロヤ群に何らかの原因で極めて大きな擾乱が発生し,大量の小惑星群が地球へ到達したことが物語られています.
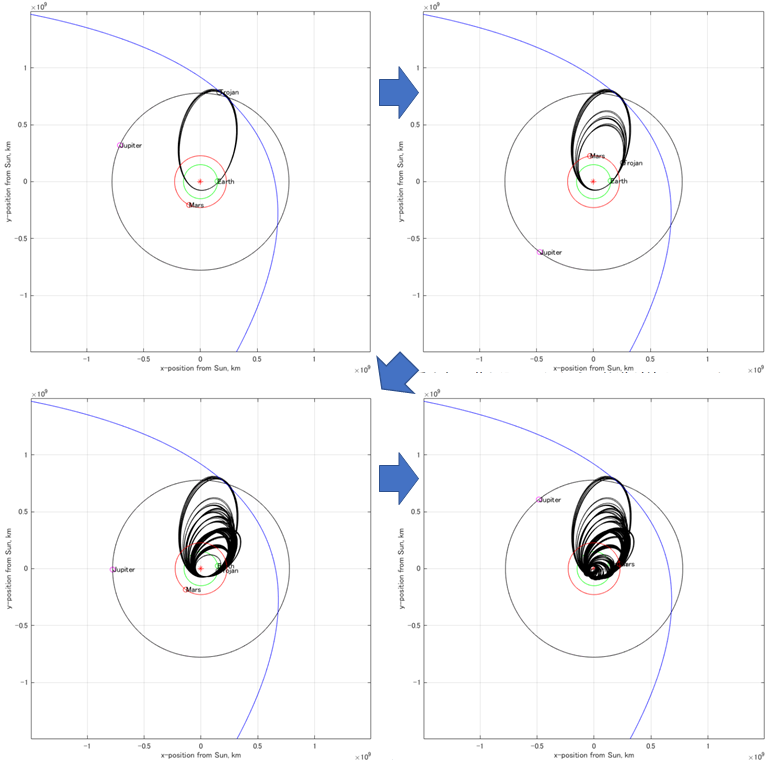
上図は簡単なものではありますが,木星トロヤ群がとある擾乱要因によって軌道を大きく乱されて木星軌道より内側に落ち込み,地球や火星が何度も何度も,少なくとも数百年間に渡って襲撃を受け続ける状況をシミュレーションしたものとなります.
黒が木星軌道,緑が地球軌道,赤が火星軌道です.青い線は擾乱源となった物体の軌道を示しています.
このシミュレーション結果を見る限りは,襲撃を予測していち早く木星圏内へ避難したd計画(番外編又は第9巻ご参照)は妥当なものであったと言えます.
地球を割ることができるかどうかの確認は以下の文献(PDF)を参考にしました.
S. T. Stewart, Z. M. Leinhardt, "Velocity-Dependent Catastrophic Disruption Criteria for Planetesimals," Astrophysical Journal, 691:L133-L137, 2009.
38.5.人工重力発生装置
本当の世界の状況は冒頭に図示しましたが,これまでコクーン住民が信じていた虚構の世界は以下のようになります.
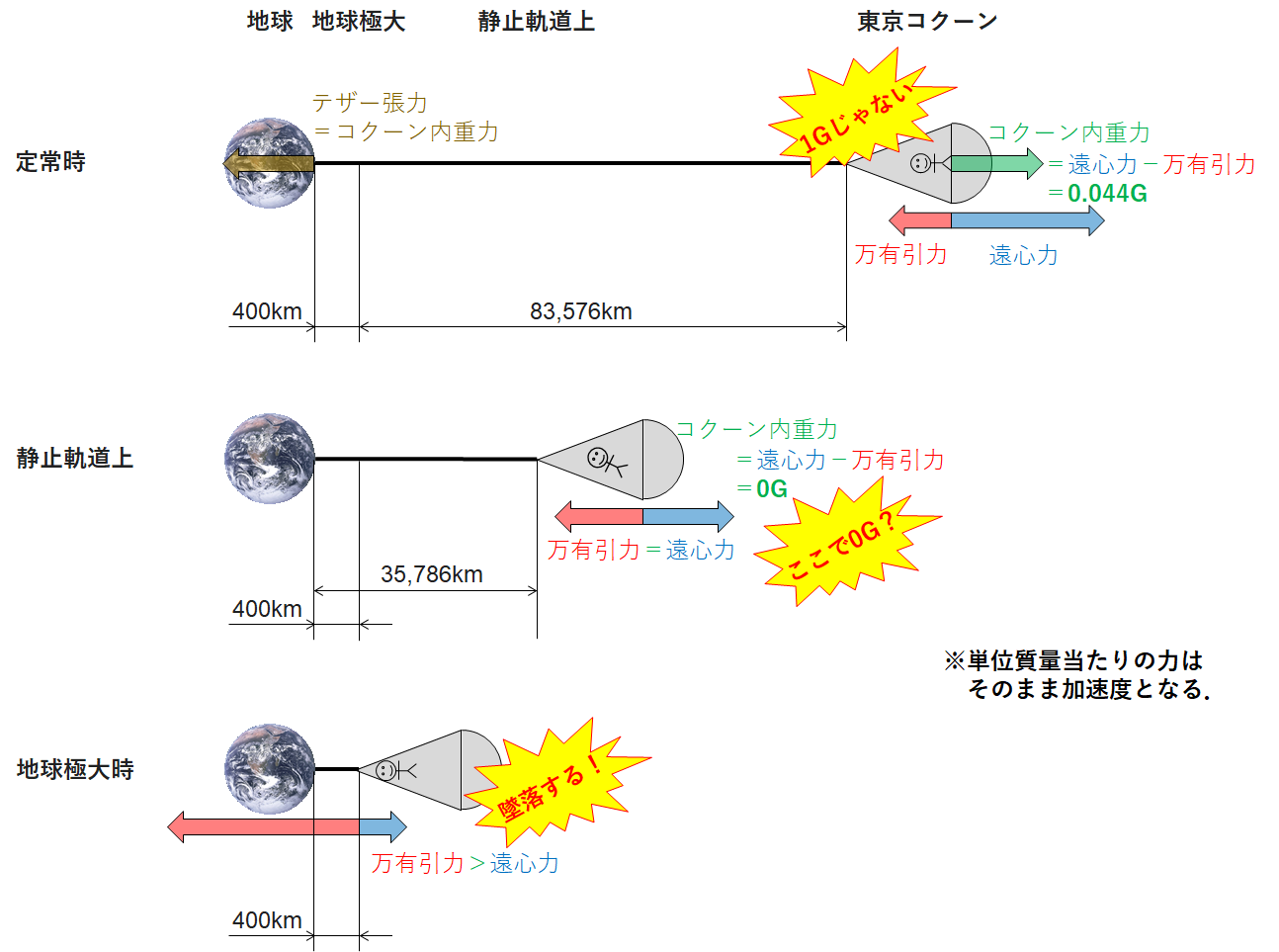
もし地球に繋留されているとすれば,第2話の「日本国国土交通課 統計要覧」の数値を採用するとおかしなところが幾つか出て来ます.
まず,テザーが全伸展した定常時のコクーン内重力は1Gにはなりません.
次に,地球極大に向かってコクーンが降下するとき,地球極大時よりも手前にある静止軌道高度で0Gになってしまいます.
そして静止軌道高度よりさらに降りると,遠心力よりも地球の万有引力の方が大きくなるのでコクーンは地球へ墜落してしまいます.
いくら制限が掛かっているからといっても初等物理まで制限されているとすると,コクーン内での諸活動が破綻してしまいます.従って初等物理は周知の事項であったと思われます.
それでも重力環境の齟齬が話題とならなかったのは,コクーン住民が「よく分からないけど天上人が何らかの技術でそうしているんだろう」と考えていたからでしょう.
実際,アラタは「人工重力発生装置」を見せられます.
そして,人工重力発生装置が重力の差分を埋め合わせていたのだと理解したことでしょう.
しかし実物を目にすると違和感…を感じたのはさすがアラタです.
ところで,例え人工重力発生装置が実際にあったとしても,コクーン内の現象から不自然な状況を気付くことは可能であったと思われます.
祇園さんは地球極大からアポジへのコクーン上昇時に飛び降りました.
そのときのアラタが動揺していなければ,祇園さんが飛び降りた場所と落下した場所の距離が理論値よりも大きかったことに気付いたのかも知れません.
この位置のずれはコリオリ力によって起こります.
地球が86,164秒(=1恒星日,地球の恒星に対する自転周期は24時間=86,400秒ではありません)で1自転するのに比べてアドラステアが木星を1公転する時間が7時間余と短いので,本当の世界ではコクーンは虚構の世界に比べて3倍強の角速度で公転していることになります.これは本当の世界の方がコリオリ力が3倍強であることとなって,落下中に受けるコリオリ力によって祇園さんの身体は横方向により大きくずれて行きます.
落下地点を測定していれば,コクーンがどれくらいの角速度で中心天体周りを公転しているのかが求められ,地球に繋留されているとすると生じる矛盾を見出せたことでしょう.
しかしあのときはそれどころではなかったですよね..
38.6.告白します
こうして「本当の世界」が明らかとなりました.
これまで「宇宙考証の解説」を行って参りましたが,幾つかのシミュレーションは「本当の世界」に基いていました.
しかし数値やその根拠を書くと「本当の世界」が明らかになってしまいますので,工夫を凝らして記述してきたことを告白します.
幾つか挙げると…
第1話ではのっけから「虚構の世界」に基いた絵を載せていました.しかしグラフは「本当の世界」で計算したものです.
第2話の冒頭に掲載したモデルの図は,本作第38話中にも見られますがそこには「Jupiter」「Moon」という文字が見えています.
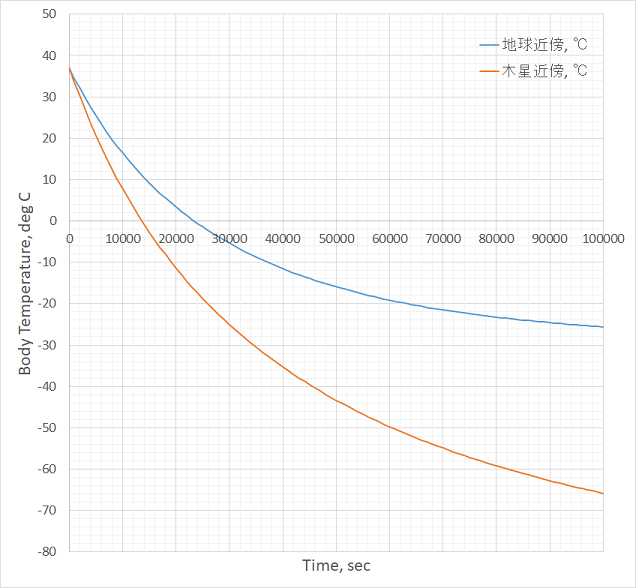
第4話のルイの体温のグラフは虚構の世界のものでしたので,改めて虚構の世界と本当の世界で氷像になれる時間にどのくらい違いがあるのを下記に示します.太陽から遠いので,地球近傍にいるときよりも急速に体温が低下することが分かります.
第5話のグラフなどでは,縦軸名に「Vertical distance from Perigee」と記載しており,これは正しい表現ですが,「高度」とは書きませんでした.
…というような感じでありましたが,宇宙分野の中にはかなり早い段階で見抜かれていた方もいらっしゃったように思われます.
さて,いまここで私たちは本当の世界について共通の認識を持つことができました.
なかなかHeavyな設定ですよね.
作者先生方の設定,プロの技に圧倒され続けて参りました次第です.
筆者としては,先生方の物語を根底で支援するべく非常に楽しい時間を過ごさせて頂きました.実益としては宇宙科学技術連合講演会で4年間に渡って宇宙考証に関する発表させて頂きましたし,先生方からの「こういうふうに設定したい」「こう描きたい」というご要望に対してこれらの成立性を定量的に検証するためにシミュレーションを行いましたが,これまで何故か手を出さなかったMATLAB®を修得することができました.感謝感謝です.
なんかもう終わりみたいなまとめ方してしまいましたが,第39話,第40話,そして番外編へと続けたいと思います.