触感ディスプレイは触り心地を仮想的に生成する装置です.
特にテクスチャ(物の表面の触感・触質感)を生成する技術に強みがあります.
視聴覚刺激に加えて,デジタル機器やバーチャル・リアリティ環境に触覚体験を付与します.
Tactile texture displays virtually produce the sense of touch for gadgets and virtual reality environments.
Especially, we have abundant experiences to create virtual textures, the sense of surfaces.
タッチパネルのための触感ディスプレイ
Tactile texture display / Surface display
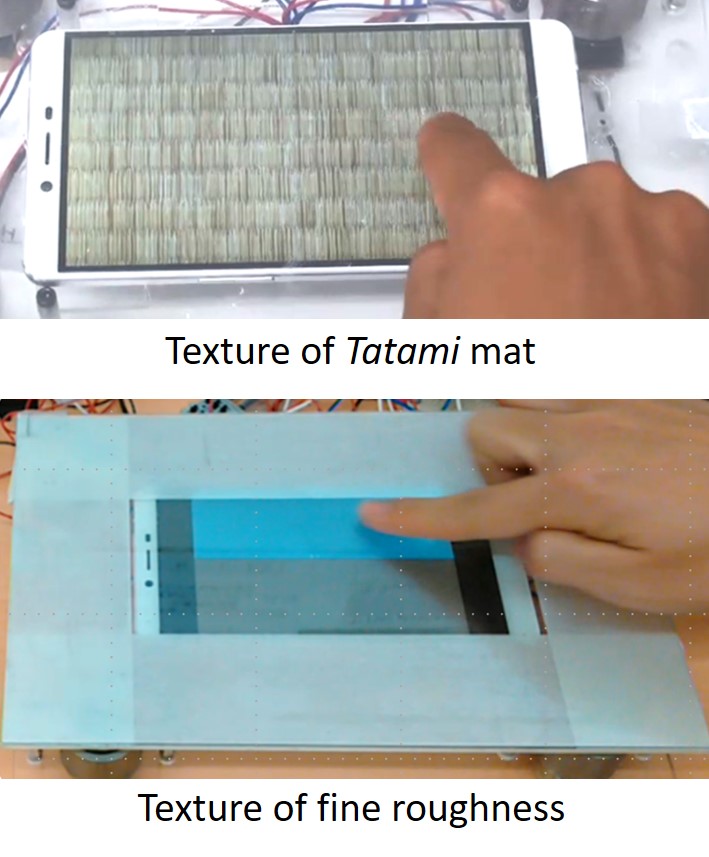 タッチパネル用の触感ディスプレイ技術を開発しています.
われわれの手法の大きな特徴は,本命と考えられている機械的変位刺激 (Vibrotactile stimuli) と,静電気摩擦刺激(Electrostatic friction) を組み合わせた,高品質な触感刺激を実現していることです.
これまでに,2種類の刺激を併せてよりリアルなテクスチャ(素材表面の触り心地) 刺激を提示することに成功しています.
タッチパネル用の触感ディスプレイ技術を開発しています.
われわれの手法の大きな特徴は,本命と考えられている機械的変位刺激 (Vibrotactile stimuli) と,静電気摩擦刺激(Electrostatic friction) を組み合わせた,高品質な触感刺激を実現していることです.
これまでに,2種類の刺激を併せてよりリアルなテクスチャ(素材表面の触り心地) 刺激を提示することに成功しています.
We are developing tactile texture displays suitable for touch panels.
The biggest feature of our approach is the conjunction of vibrotactile stimuli and electrostatic friction stimuli,
of which both are practical solutions of tactile feedback technique for touch panels.
We demostrated that our method more effectively presents virtual textures than either vibrotactile or
electrostatic friction stimuli in terms of realism.
• Related publication:
[English]
[Video]
本物の素材の触感を変える触感操作技術
Augmented reality techniques for textures
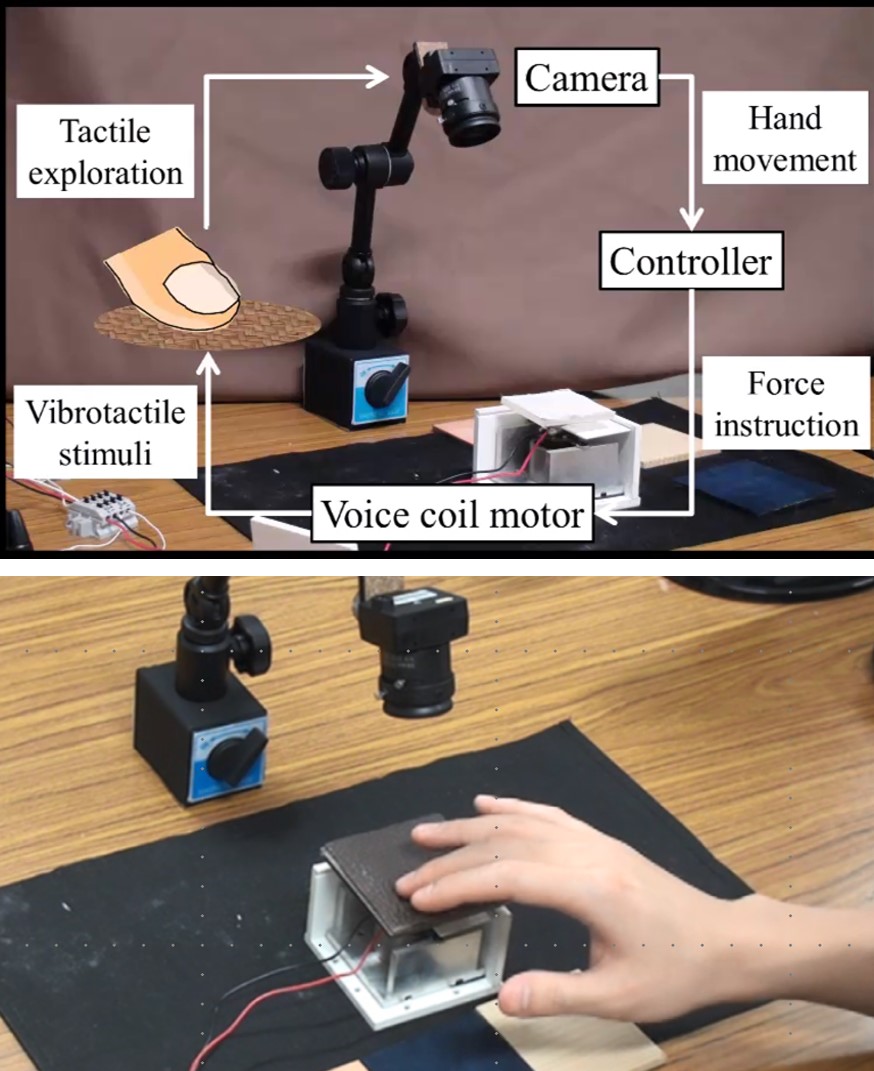 触感ディスプレイ技術を用いれば,本物の素材の触感を操作することも可能です.
素材を擦る運動に併せて適切な触刺激を指腹の皮膚に与えれば,その素材をより粗く感じさせることが可能です.
写真の装置は,木材や紙,皮革などの2種類の粗さ感(細かい粗さ感とマクロな粗さ感)を増加させることができる装置です.
逆に,手の運動に無相関なノイズ刺激を皮膚に与えておくことで,それがマスク効果となって,素材が滑らかに感じられます.
触感ディスプレイ技術を用いれば,本物の素材の触感を操作することも可能です.
素材を擦る運動に併せて適切な触刺激を指腹の皮膚に与えれば,その素材をより粗く感じさせることが可能です.
写真の装置は,木材や紙,皮革などの2種類の粗さ感(細かい粗さ感とマクロな粗さ感)を増加させることができる装置です.
逆に,手の運動に無相関なノイズ刺激を皮膚に与えておくことで,それがマスク効果となって,素材が滑らかに感じられます.
Tactile display techniques can be applied to actual material surfaces to alter their textures.
By presenting tactile stimuli to the finger pad sliding over the surface, the roughness experienced from the
surface can be increased.
The setup in the right figure can manipulate two types of roughness sensations
(microscopic and macroscopic roughness) of materials including paper, woods, and leather.
Also, the suface can be felt smoother by using noisy tactile stimuli which are independent on the sliding
finger motion.
• Related publication:
[English]
[Video]
足裏への触覚呈示技術 -踏み心地の生成-
Foot step display
 落ち葉や霜柱など,色々な物体を踏んで破壊するときの刺激を生成するバーチャル・ リアリティ技術を開発しています.
踏み方によって,足に感じる刺激は異なりますが,人は踏み方に関わらず, 踏んだ物体を特定することができます.
そこで,どのような足の動きにも対応し, その物体の踏み心地を生成する技術を開発しました.
落ち葉や霜柱など,色々な物体を踏んで破壊するときの刺激を生成するバーチャル・ リアリティ技術を開発しています.
踏み方によって,足に感じる刺激は異なりますが,人は踏み方に関わらず, 踏んだ物体を特定することができます.
そこで,どのような足の動きにも対応し, その物体の踏み心地を生成する技術を開発しました.
We developed a virtual reality technique for producing the sensations experienced from steping crinkling objects
such as autumn leaves.
The foot step display computes and produces tactile stimuli to the sole depending on the speed of the step
such that humans can recognize the type of virtual objects at any step speeds.
• Related publication:
[English]
[Video]
Passive Haptics: 電源を用いないハプティックインタフェース
Unpowered haptic interface
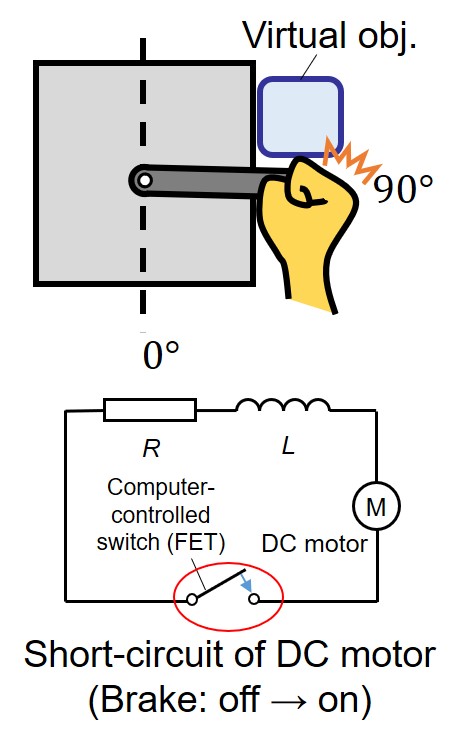 ハプティックインタフェースの問題の一つは,制御の不安定性です. これを本質的に克服できるのは,抵抗力を主体とした受動的なシステムです.
受動的なシステムは電源を要さない省エネルギーのシステムでもあります.
受動的ではあるが,提示能力が高い刺激の生成方法を研究しています.
例えば,物体に衝突した感覚を生成するために,メインブレーキの直前に刹那的にブレーキを用いることで, 知覚される衝突が大きくなります.
ハプティックインタフェースの問題の一つは,制御の不安定性です. これを本質的に克服できるのは,抵抗力を主体とした受動的なシステムです.
受動的なシステムは電源を要さない省エネルギーのシステムでもあります.
受動的ではあるが,提示能力が高い刺激の生成方法を研究しています.
例えば,物体に衝突した感覚を生成するために,メインブレーキの直前に刹那的にブレーキを用いることで, 知覚される衝突が大きくなります.
A problem of haptic interfaces is the risk of injury when their control is unstable.
Passive haptic interfaces which operate by using resistance forces can be a solution to realize inherent safety.
They are also energy-saving systems. We are studying effective stimulation methods to present clear haptic sensations.
For instance, a short-time pulsive brake prior to the main brake causes a greater sense of impact.
• Related publication:
[English 1]
[English 2]
凹凸を擦るときの接触力のモデル
Modeling of contact force on a bump and hole
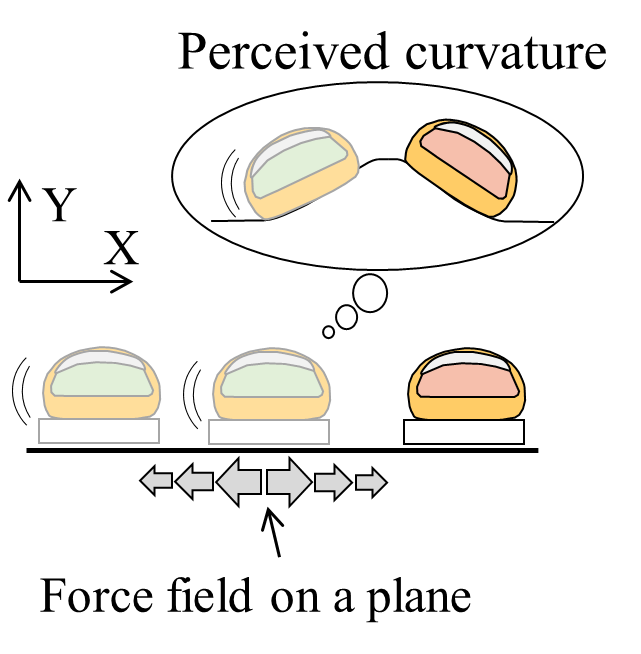 人は凹凸を指でなぞるとき,凹凸の起伏自体よりも, 凹凸をなぞるときに発生する指腹と凹凸面の相互作用力(接触力)を基に,凹凸の形状を知覚しています.
この原理を用いれば,起伏のない平面に力場を発生させることにより,仮想的な凹凸を表現することができます.
すなわち,図のX方向に発生する力場を用いれば,Y方向の変位を感じるという錯覚が生じます.
この研究では,よりよい相互作用力モデルを構築し,本物らしい凹凸の生成を実現しています.
人は凹凸を指でなぞるとき,凹凸の起伏自体よりも, 凹凸をなぞるときに発生する指腹と凹凸面の相互作用力(接触力)を基に,凹凸の形状を知覚しています.
この原理を用いれば,起伏のない平面に力場を発生させることにより,仮想的な凹凸を表現することができます.
すなわち,図のX方向に発生する力場を用いれば,Y方向の変位を感じるという錯覚が生じます.
この研究では,よりよい相互作用力モデルを構築し,本物らしい凹凸の生成を実現しています.
We are studying a friction model for a fingertip sliding over a bump and hole.
Humans perceive bumps and holes on the basis of the changes in this friction.
This principle can be utilized for virtual reality systems displaying surface profiles.
A better friction model produces a more realistic sense of surface profiles.
• Related publication:
[English]
 触感ディスプレイ: 「触る」をつくるバーチャル・リアリティ技術
触感ディスプレイ: 「触る」をつくるバーチャル・リアリティ技術