ハプティクスは触れることを中心とした,運動と感覚に関する学問です.
触れることで感じられる質感の理解と設計法を研究しています.
特にテクスチャ(物の表面特徴)に人が触れ,その特性を理解する原理「テクスチャ知覚原理」の研究に精力的に取り組んでいます.
Haptics is an interdisciplinary research area involving touch-related perception and motion.
Especially, our expertise includes the perceptual mechanisms on textures and surface features of objects.
タップによる硬さ知覚の原理解明
Hardness perception by tapping
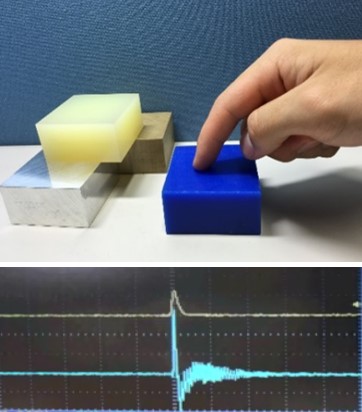 われわれはモノの表面を叩いて(タップ)その硬さを判断します.
このとき,指とモノが接触している時間はわずか数十ミリ秒です.
この短い時間で生じる情報から,われわれはどのように硬さを判断しているのでしょうか.
実は,タップによって生じる振動の周波数および減衰の特性を利用していることが分かりました.
また,反力の最大値や損失も,硬さの判断に影響を与え得ることが分かっています.
これらの発見は触知覚の深い理解に留まらず,コンピュータゲームなどにも応用されています.
われわれはモノの表面を叩いて(タップ)その硬さを判断します.
このとき,指とモノが接触している時間はわずか数十ミリ秒です.
この短い時間で生じる情報から,われわれはどのように硬さを判断しているのでしょうか.
実は,タップによって生じる振動の周波数および減衰の特性を利用していることが分かりました.
また,反力の最大値や損失も,硬さの判断に影響を与え得ることが分かっています.
これらの発見は触知覚の深い理解に留まらず,コンピュータゲームなどにも応用されています.
We tap an object’s surface in order to judge its hardness properties when the object is rigid
and cannot be deflected by pinching or pushing.
The contact period of tapping is as short as a few tens of miliseconds.
How can we judge the object hardness using this short-time information?
Humans leverage frequencies and attenuation of vibration caused by tapping.
A sharp reaction force also can be a source for judging hardness. Maximum reaction forces,
their sharpness, and loss influence subjective hardness.
• Related publication:
[English 1]
[English 2]
[English 3]
指の皮膚変形を推定するための装着型センサ
Wearable skin deformation sensor for fingertip
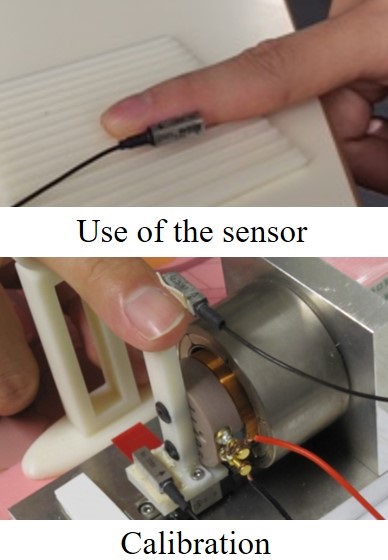 物に触れているときの指の高速で微小な変形を精緻に計測するのは困難ですが,われわれは高精度の加速度計を指の側面に設置し, 指腹のせん断変形を推定する方法を開発しました.
指腹のせん断変形は,指の側面に伝達するため,側面の変形を観測することで,指腹の変形を予測することが可能です.
測定には加速度計を用いるので,高周波帯での計測が得意です.
また,装着型のセンサであるため,能動的な触察下での計測が可能です.
物に触れているときの指の高速で微小な変形を精緻に計測するのは困難ですが,われわれは高精度の加速度計を指の側面に設置し, 指腹のせん断変形を推定する方法を開発しました.
指腹のせん断変形は,指の側面に伝達するため,側面の変形を観測することで,指腹の変形を予測することが可能です.
測定には加速度計を用いるので,高周波帯での計測が得意です.
また,装着型のセンサであるため,能動的な触察下での計測が可能です.
We developed a method for estimating the fine and fast shear deformation of a finger pad as
it scans the surface of a material.
Using a miniature accelerometer, we measured the acceleration at the radial skin, the deformation of which is
accompanied by the shear deformation of the finger pad.
Using a transfer function, as specified in a separate experiment, between the pad and side of a finger,
we estimated the shear deformation of the finger pad in the frequency domain.
This method allows us to measure the skin deformation during exploration since it is a wearable type sensor.
• Related publication:
[English]
肌と肌のふれあいで生じる摩擦の追究
Friction of skin-skin contact
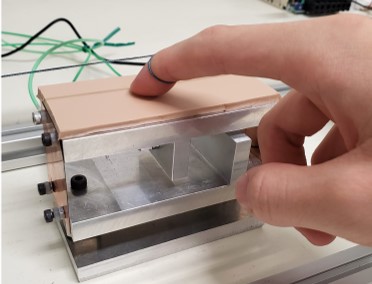 肌の触れあいは触感の中でも特別な意味を持ちます.
指で肌に触れたときに生じる特異的な接触現象を研究し,肌に触れたときの心地よさ,また心地悪さの正体を追究しています.
特に,摩擦と柔らかさに注目して新しい事実を発見してきました.
こういった成果は,触り心地の良い人工皮膚の開発などに活かされます.
肌の触れあいは触感の中でも特別な意味を持ちます.
指で肌に触れたときに生じる特異的な接触現象を研究し,肌に触れたときの心地よさ,また心地悪さの正体を追究しています.
特に,摩擦と柔らかさに注目して新しい事実を発見してきました.
こういった成果は,触り心地の良い人工皮膚の開発などに活かされます.
To touch skins by using a finger tip is a special form of touch.
Under this skin-skin condition, singular contact statuses are developed, which determine the comfort or uncomfort
felt when touching skins.
Especially, we have found some new facts between the relationships between friction and softness.
These studies will be leveraged in developing comfortable artificial skins.
• Related publication:
[English 1]
[English 2]
[English 3]
HumTouch: ハムノイズを利用したタッチ・センシング技術
HumTouch: Touch sensing techniques using mains hum
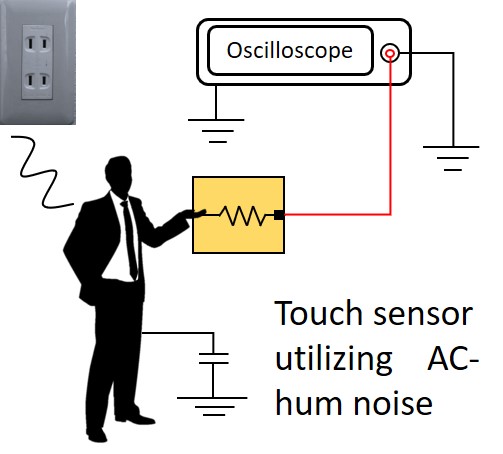 人の体の中には,家庭用の電源から発せられるハムによって電流が流れています.
人が物に触れると,人の体からその物体に微弱な電流が流れます.
これを増幅して計測することによって,身の回りの様々な物体をタッチセンサとして利用することができます.
例えば,紙,石,木材などがタッチセンサとして利用できることを実証しています.
物体が導体でなくてもこの原理が成立するため,様々な応用につながる技術です.
人の体の中には,家庭用の電源から発せられるハムによって電流が流れています.
人が物に触れると,人の体からその物体に微弱な電流が流れます.
これを増幅して計測することによって,身の回りの様々な物体をタッチセンサとして利用することができます.
例えば,紙,石,木材などがタッチセンサとして利用できることを実証しています.
物体が導体でなくてもこの原理が成立するため,様々な応用につながる技術です.
Ambient power supply (AC mains) causes an electric current flow in the human body. This current flows into object
surfaces when they are touched. Electrodes on the object surface capture the current, and using the surface impedance
localization technique, the human touch is detectable and localized. This enables us to use daily life objects,
which do not need to be conductive, as touch-sensing surfaces.
• Related publication:
[English 1]
[English 2]
[English 3]
[English 4]
テクスチャの材質感次元
Tactile dimensions of texture
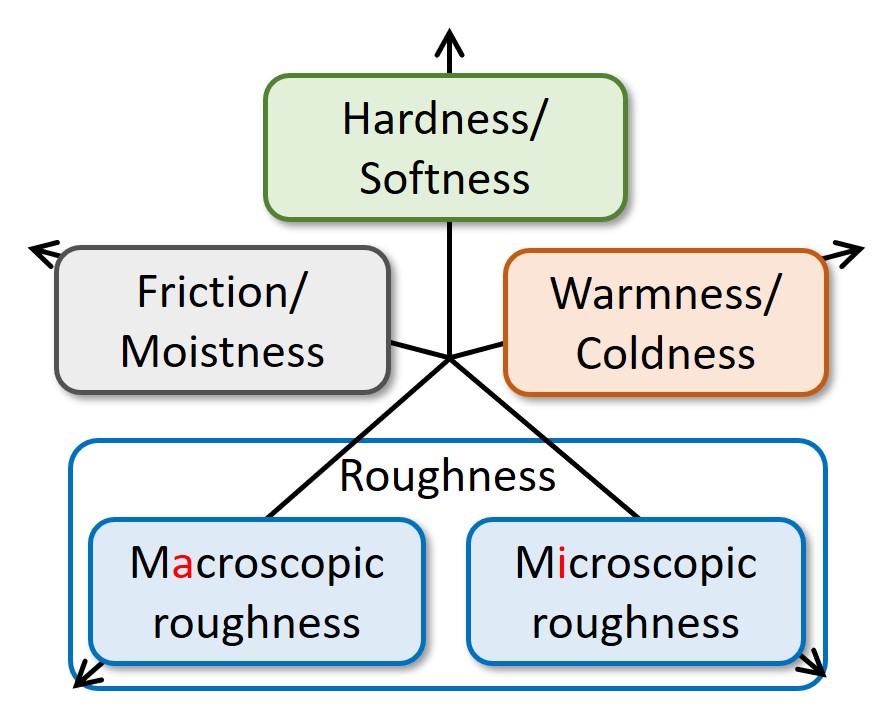 われわれが素材の触感を表現するとき,粗い・柔らかい・暖かい・硬い・つっぱるなど,たくさんの言葉を用います.
このような触感を表現する情報空間の次元構成はどのようになっているのでしょうか?
これまでの調査の結果,触感の次元は,粗さ感・硬軟感・温冷感・摩擦感であるとの結論に達しました.
さらに,粗さ感は知覚メカニズムの明確な違いから,マクロ粗さとミクロ粗さに分けることができます.
したがって,材質感次元の数は5となります.
われわれが素材の触感を表現するとき,粗い・柔らかい・暖かい・硬い・つっぱるなど,たくさんの言葉を用います.
このような触感を表現する情報空間の次元構成はどのようになっているのでしょうか?
これまでの調査の結果,触感の次元は,粗さ感・硬軟感・温冷感・摩擦感であるとの結論に達しました.
さらに,粗さ感は知覚メカニズムの明確な違いから,マクロ粗さとミクロ粗さに分けることができます.
したがって,材質感次元の数は5となります.
We have many adjective words that can be used for expressing textures of material surfaces.
What is the dimensional structure of the space of such adjective words and human textural perception?
It was concluded that the reasonable psychophysical dimensions are roughness/smoothness, hardness/softness,
warmness/coolness, and friction (stickiness/slipperiness).
Roughness percepts can be further categolized into two dimensions; they are macroscopic (bulky/flat) and
microscopic (fine, rough/smooth) roughness. Hence, these are five principal dimensions.
• Related publication:
[日本語]
[English]
Haptic Invitation: ヒトはなぜ触れてみたくなるのか?「触れてみたさ」の解明
Haptic invitation: Why do we feel inclined to touch?
 目にした素材についつい触れてみたくなる,そんな体験は誰もがしていることです.
この触察行動の誘引現象(Haptic Invitation)の解明を目指しています.
これまでに,材質感の際立った素材は特定の触れ方を誘引する確率が高いことを明らかにしました.
つまり,触察行動の誘引現象は,材質感をそれに適した触れ方で確かめる行為と推察できます.
目にした素材についつい触れてみたくなる,そんな体験は誰もがしていることです.
この触察行動の誘引現象(Haptic Invitation)の解明を目指しています.
これまでに,材質感の際立った素材は特定の触れ方を誘引する確率が高いことを明らかにしました.
つまり,触察行動の誘引現象は,材質感をそれに適した触れ方で確かめる行為と推察できます.
We sometimes unconsciously touch objects when seeing them. We call such phenomena as haptic invitation.
Thus far, we have found that prominent surface properties invite human touch, and the type of prominence
determines the type of invited motions. For example, we tend to rub finely rough surfaces, and push and
scratch apparently soft and frictional objects, respectively.
Haptic invitation encourages us to feel surfaces using appropriate touch motions.
• Related publication:
[日本語]
[English]
ハプティクスの錯覚
Haptic illusion
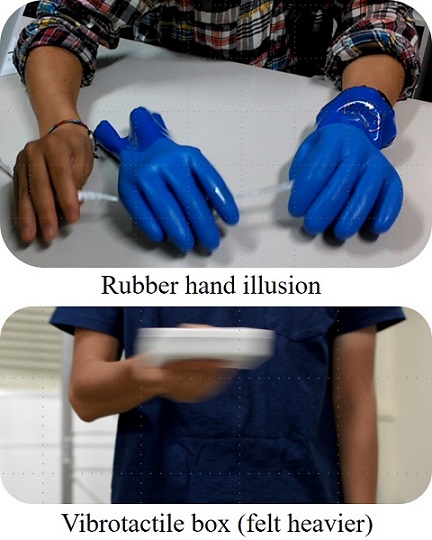 錯覚は知覚のメカニズムを解き明かすための糸口となってきました.
特に,皮膚への振動触刺激による力の錯覚とラバーハンドイリュージョンと呼ばれる,身体所有感の錯覚について研究しています. 物を把持しているときに,その指に振動触刺激を提示すると,その物が重く感じられるという錯覚があります.
ラバーハンドイリュージョンは,視覚・触覚・運動感覚の多感覚統合によって生じる錯覚で,自分の手に似せた人工の手が, あたかも自分の手であるかのように感じるという錯覚です.
錯覚は知覚のメカニズムを解き明かすための糸口となってきました.
特に,皮膚への振動触刺激による力の錯覚とラバーハンドイリュージョンと呼ばれる,身体所有感の錯覚について研究しています. 物を把持しているときに,その指に振動触刺激を提示すると,その物が重く感じられるという錯覚があります.
ラバーハンドイリュージョンは,視覚・触覚・運動感覚の多感覚統合によって生じる錯覚で,自分の手に似せた人工の手が, あたかも自分の手であるかのように感じるという錯覚です.
Illusions can be a good entrance to seek the mechanisms of perception. We are studying the illusory force
perception via vibrotactile stimuli and illusory bodyownership called the rubber hand illusion.
When vibrotactile stimuli are applied to the hands and fingers grabbing an object, the object is felt heavier.
The rubber hand illusion is a bodyownership illusion caused by the multisensory integration of visual,
tactile, and proprioceptive information. Humans feel a fake hand as a part of their own body.
• Related publication:
[English 1]
[English 2]
[English 3]
[English 4]
[English 5]
 ハプティクス: 「触れる」ことで得られる質感の理解とデザイン
ハプティクス: 「触れる」ことで得られる質感の理解とデザイン