


epi.37

37.地球降下
37.1.Guidance is internal
「Guidance is internal」とは,宇宙機の誘導制御が地球や,本作の場合ではコクーンからの支援を受けたもの或いは基準としたものから,宇宙機自身が有している慣性航法装置(INS)によって搭載されているジャイロや加速度計による計測或いは恒星などの天体を基準としたものに移行したことを意味しています.
ロケットの打上の例で簡単に言えば,externalの内は「飛翔の方位角は北極を基準として○○°の向きである」と指示されていたものが,internalになると「飛翔方向はカノープスに対して○○°の向きである」などと移行されます.
実例を見てみましょう.
打上前15秒の時点で「T minus 15 seconds, guidance is internal」と伝えています.
なお,このアナウンスはPublic Affairs Officer,即ち広報担当者によるもので,恐らく一般の方には最も馴染みのある音声ではないかと思います.一方,実際の打上管制は別経路で宇宙船と管制室との間で行われています.
いまどき何が便利かって,この辺のやり取りは全て公開されているんですよね.
例えばアポロ11号の打上前後では,打上管制,広報ともにこちらのサイトで読むことができます.ここ,ところどころにあるMP3プレイヤーの下に内容が全文記載されているので,英語のヒアリングの練習にも良いかも知れませんね.
また,ミッション完了後にまとめられるミッション報告書もこちらのPDFで読めます.このミッション報告書の8-11ページでは,アポロ11号が慣性航法で使用した恒星の一覧が掲載されています.
宇宙機には,回転速度を計測するジャイロや加速度を計測する加速度計に加えて,主要な恒星の位置を星図として有していてカメラで撮影した星々の画像と比較することでいま宇宙機はどの方向を向いているかを推定するスターセンサまたはスタートラッカを搭載しており,恒星を基準とする場合に使われます.いわゆる天測航法ですね.
余談ですが英語が苦手だ~という方に参考として,GoogleやExciteの翻訳もまぁまぁ良いのですが,数年前に新星の如く登場したDeepLは非常にオススメです.DeepLはAIによる機械翻訳で,多くの言語間の自然な翻訳を行ってくれます.ただし,誤字をスルーしたり,一文又は複数の文を全くスルーしてしまう,勝手に補ってしまうということもありますので,少なくとも無料版では大意を知るに留めた方が良さそうです.
37.2.コクーン緊急降下
コクーン群に小規模な小惑星群が接近しています.
東京コクーンを例に取れば,第1話でも述べたように,テザー伸展長は平常時で83,576kmですから,高度10,000kmまでの緊急降下では7万km程度,テザーが巻き取られることになります.
緊急降下しなくてもコクーンやテザーへの影響はほぼ無いという予測であっても,緊急降下によって8万kmあったテザーが1万kmになるので,小惑星がテザーに接触する確率は単純計算で更に8分の1になるという,安全側へ寄った極めて妥当な対策であるといえます.

小惑星はガッチガチの岩石のようなイメージもありますが,実際にはスカスカ,サクサクなものもあります.
また,ガッチガチであっても表面や地表に近い内部の物質が太陽に近付いて温度が上昇するに伴って揮発して噴出するものもあります.
天体の運動は,軌道運動をしている限り,考えられる他天体からの影響を尽く考慮していれば,計算によって正確に予測することができます.また,小惑星同士の影響は小惑星の質量が小さいことから万有引力も小さいため,短期間では殆ど無いと言えます.
だいたいの小惑星はだいたいどのような性質のものかは光学観測によって推定されていますが,しかし全てを完全に知ることはできませんので想定外の挙動を示すものも中にはあることでしょう.
このような小惑星からのガスの噴出が起こると,短時間で軌道が僅かに変化することもあります.それは僅かであったとしても太陽系の規模(数億km~数十億kmのオーダー)に対して僅かなだけであって,実際には何千km,何万kmなどという変化ですから,ソウイチロウが危惧していることは蓋然性のあることです.

37.3.コックピット・パラシュート
週末ロケットの製作シーンです.
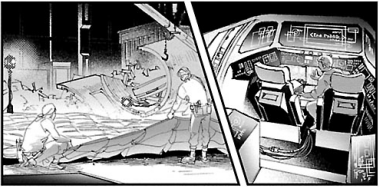
右のコマはコックピット内のハードウェア,ソフトウェアの組立や動作確認が行われているようです.
いきなり全てを組み立ててしまうと,動作確認によって不具合が発生したとき,何処が原因なのかとか,複合的な要因であればどれとどれが不整合を来しているのかを究明することが非常に煩雑な作業になってしまいます.
そこで一つ或いは動作確認された塊ごとに取り付け,その都度,動作確認していくことが重要になります.
そうすると完全に組み上がっていないコックピットですから,外部からの支援を受けながらの動作確認となります.
だからこのコマでは,コックピットと外部とを接続しているケーブルが描かれています.
筆者はもう,このコマを拝見して,先生方の非常にシステムエンジニアリングに合致した現実的な作業風景を描かれていることにここでも驚愕し,敬服した次第です.
左のコマで広げられているのはパラシュート又はパラフォイルです.
週末ロケットは形状を見るに,有翼でリフティングボディですから,大気中では揚力を得て滑空することが可能ですが,だからと言って地上の様子が分からないことから必ずしも平坦な広い土地に着陸できるとは限りません.
その場合はパラシュート又はパラフォイルによって降下し,着地(これはハードランディングになるかも知れません)することとなります.
パラシュートは小さく折り畳んで収納し,使用時には間違いなく展開されなければなりません.
そのためには,まず全部広げて損傷がないことや縫い目が正しいことを確認し,次にきちんと材料や膜面の特性や空気力学的な特性を知りぬいた上で適切に折り畳まれる必要があります.
これも先生方の細かいところまでリアルに描くスゴイところです!
37.4.地球降下
遂に決行された地球降下.
リュカの船でも,イタズラ(第12話,第17話・第18話をご参照)しているとはいえ搭載されていたCocoon-INSですが,週末ロケットにはCocoon-INSは搭載されていません.
それ故,戦闘機パイロットであるシーザーでさえも激しく混乱しています.

1コマ目.グラスコックピットは操縦に関する情報の殆どをディスプレイに集約したものです.機体のあらゆる状況が一つ又は少数のディスプレイで確認することができ,またその中には直感的に理解できるように表示が工夫されていることから瞬時の判断にも役立つものとなっています.
2コマ目.前のコマからの続きとなりますが,シーザーはグラスコックピットの表示から,小惑星群や週末ロケットの速度が理解とは外れていることに気付きます.まず週末ロケットの位置と速度は,コクーン群が発しているであろうLORAN又はGNSSのような電波航法シグナルを利用して求めることができます.次に週末ロケットと小惑星との相対速度は,週末ロケットに搭載しているレーダーから求めることができます.両者を合わせれば,小惑星の速度が求められます.
3コマ目.測距レーダーは,週末ロケットから小惑星やコクーンといった対象物へ発信した電波が反射して戻ってくるまでの時間を計測することで,対象物までの距離を測定するものです.これは特殊相対性理論の光速度不変の原理があるからこそ可能な測距方法です.更には,発信したときの周波数と反射して戻って来るときの周波数のドップラーシフトから,週末ロケットと小惑星の相対速度を求めることもできます.
大混乱に陥ったシーザーはアラタのシステムに疑いの目を向けます.
そして4コマ目.だからもうシステムの支援を受けることなく,自身の目で判断することを決めます.この状況で瞬時判断ができるところが,さすがは戦闘機パイロットですね.
VRは「仮想現実」のことで,現実・現物ではなく,CGなどによって仮想的に現実空間を表現したものとなります.従って,VRモードではシーザーは現実の風景を目にしていません.
ARは「拡張現実」のことで,現実・現物に対してこれを拡張する情報を上乗せしたものとなります.従って,ARモードではシーザーは現実の風景を目にすることとなります.