

ボッチャロボットプロジェクト

Apple 社アクセシビリティの紹介ムービー(https://www.youtube.com/watch?v=e-TjaG63m5s)にあるように、障がいの程度によってカスタマイズが可能な技術を実装可能としています。同様に、障がい者に特化した インタフェースの重要性が世界的に認知されつつあります。 そこで、本プロジェクトでは、東京2020パラリンピックの正式競技でもあるボッチャをより多くの人々と共に協議することができるように、障がいの程度でのクラス分けをなくしシームレスで楽しめるロボット(serBOTinQ武居直行先生担当)とそれを操作するインタフェースを開発しました。私たちは、操作するインタフェースの開発、ロボットの外装デザインおよびUXムービーを担当しました。
本プロジェクトは、首都大学東京傾斜的研究費(全局分)学長採択枠の研究課題「システムデザインで支援するアクセシブルスポーツー東京オリンピック・パラリンピックに向けた首都大の新しいものづくり貢献」の一環として実施したものです。
ペルソナ分析
障がい別に6パターンのペルソナをたて、それぞれのペルソナが操作する場合、どの部分で操作することができるかを調査し、分析しました。
障がい別の機能要件
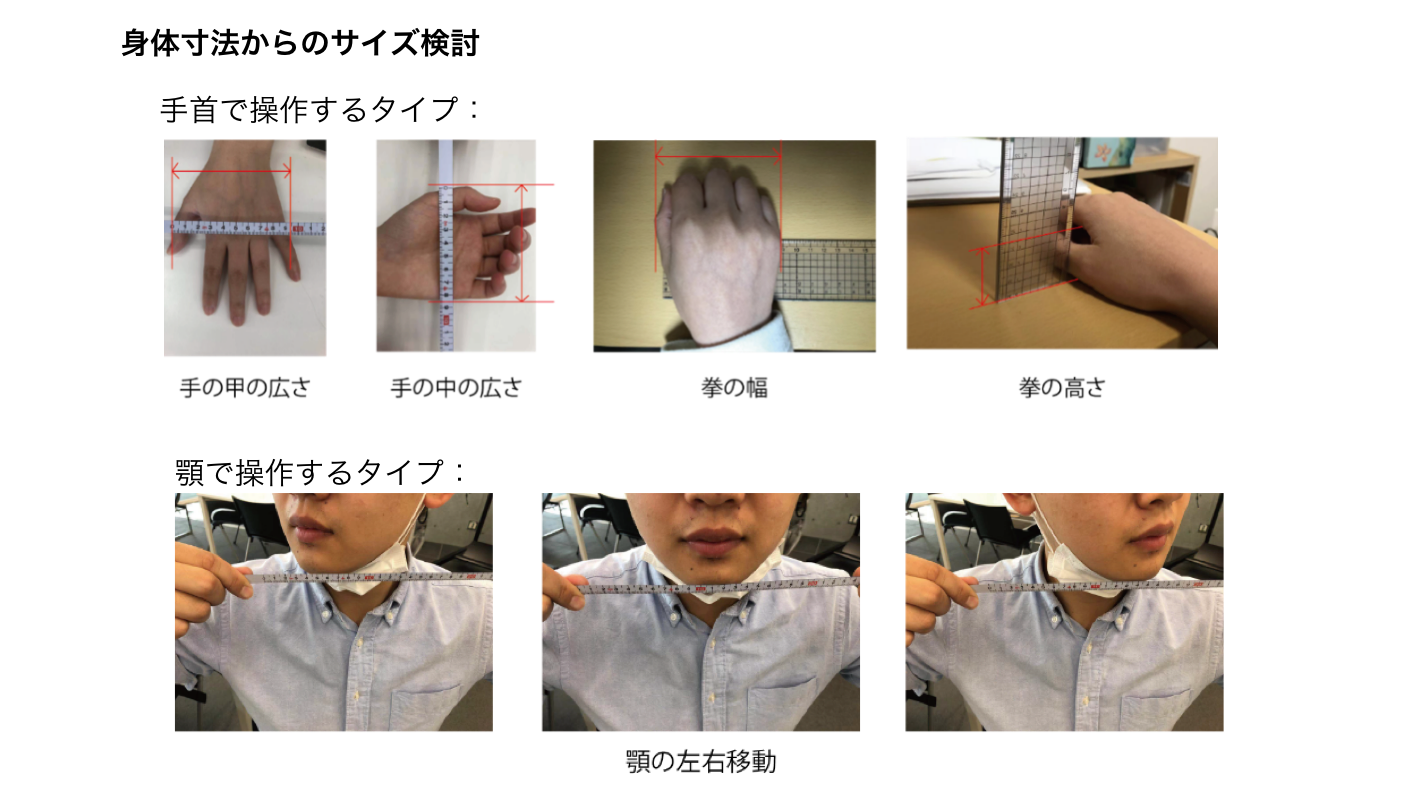
ペルソナ分析から、インタフェースに必要な機能要件を検討し、3つのパターンで検討していきました。
1)手首で操作する、2)顎で操作する、3)指で操作する
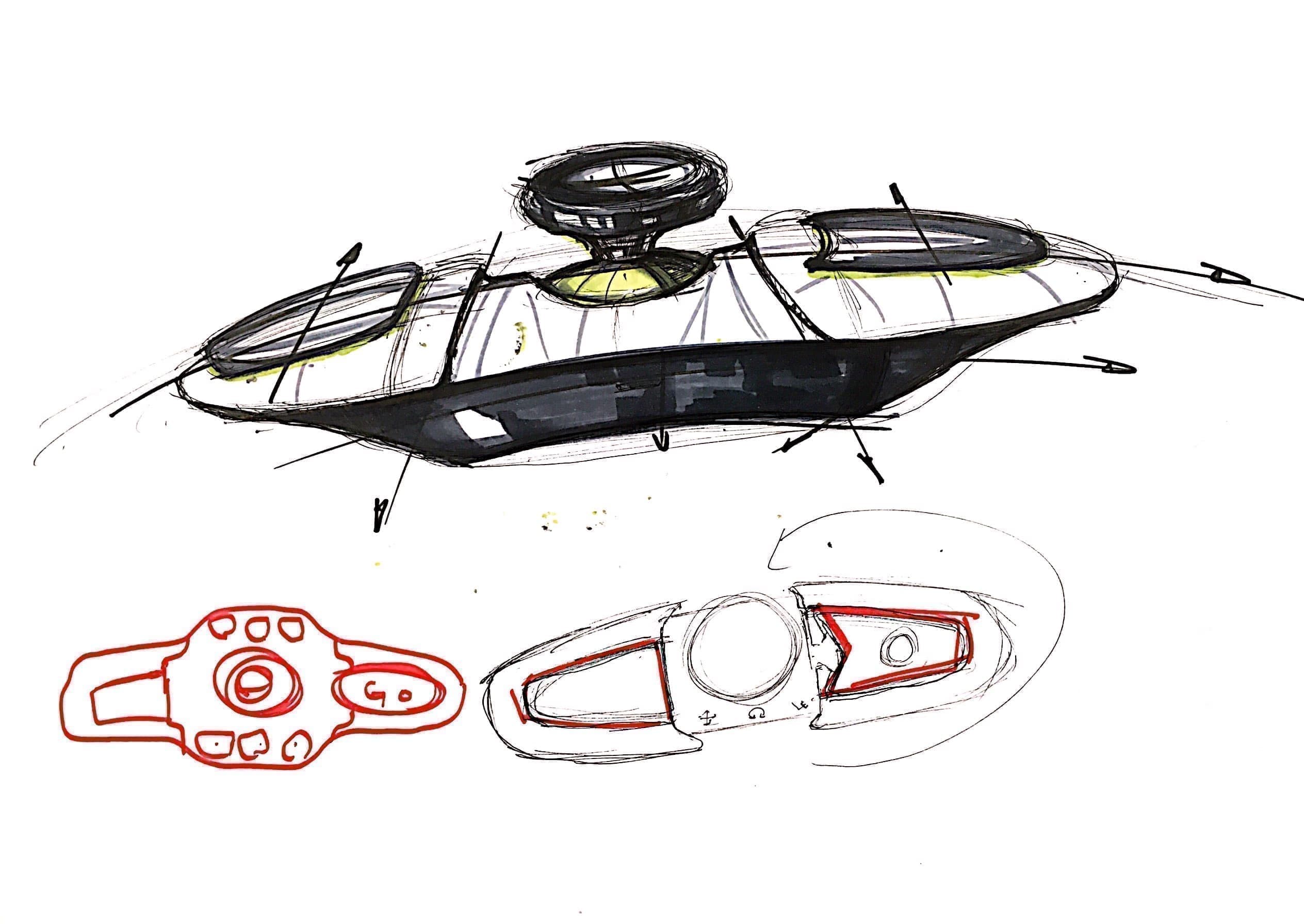
インタフェースのスケッチ

3DCADで作ったデータを3Dプリンタで出力し操作シーンを想定して実験

改善要件をまとめて再度検討
実験結果を元に再度スケッチで形状を検証
完成した提案モデル

機械システム工学科武居研究室が製作したボッチャロボットの本体
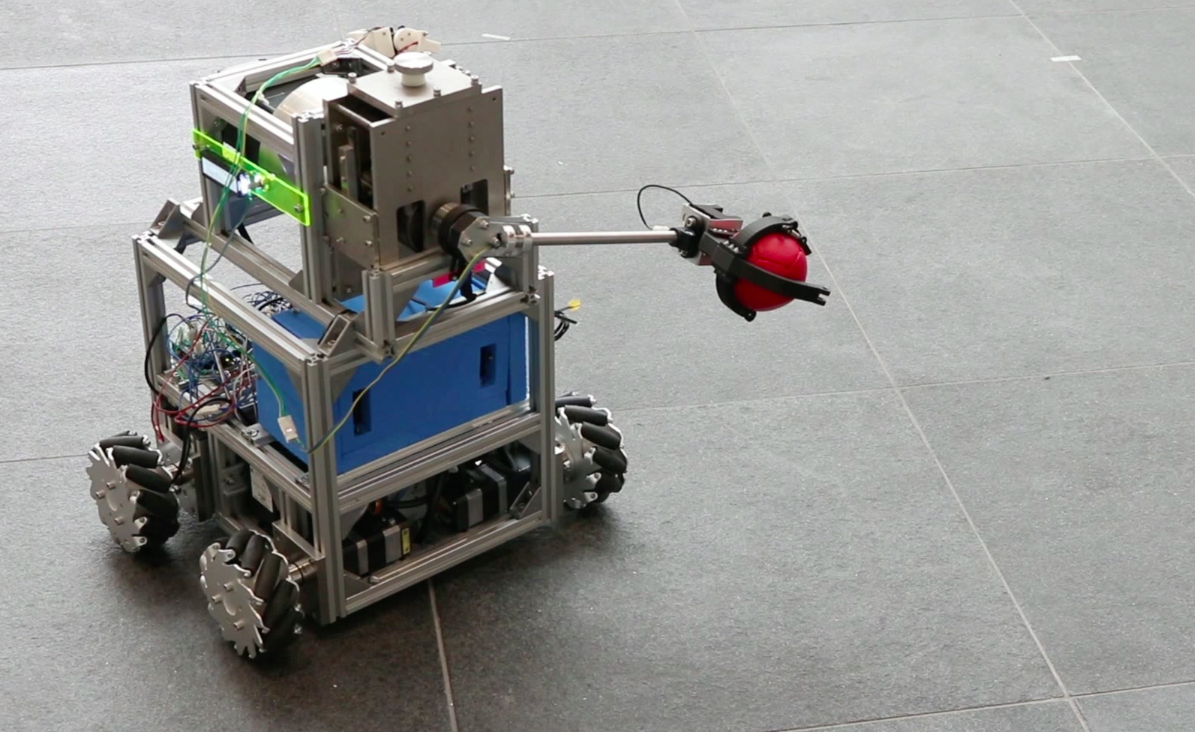
このロボットを操作するためのインタフェースが提案モデル
エルゴノミックデザインスタジオではボッチャロボット本体の外装カウルをデザイン
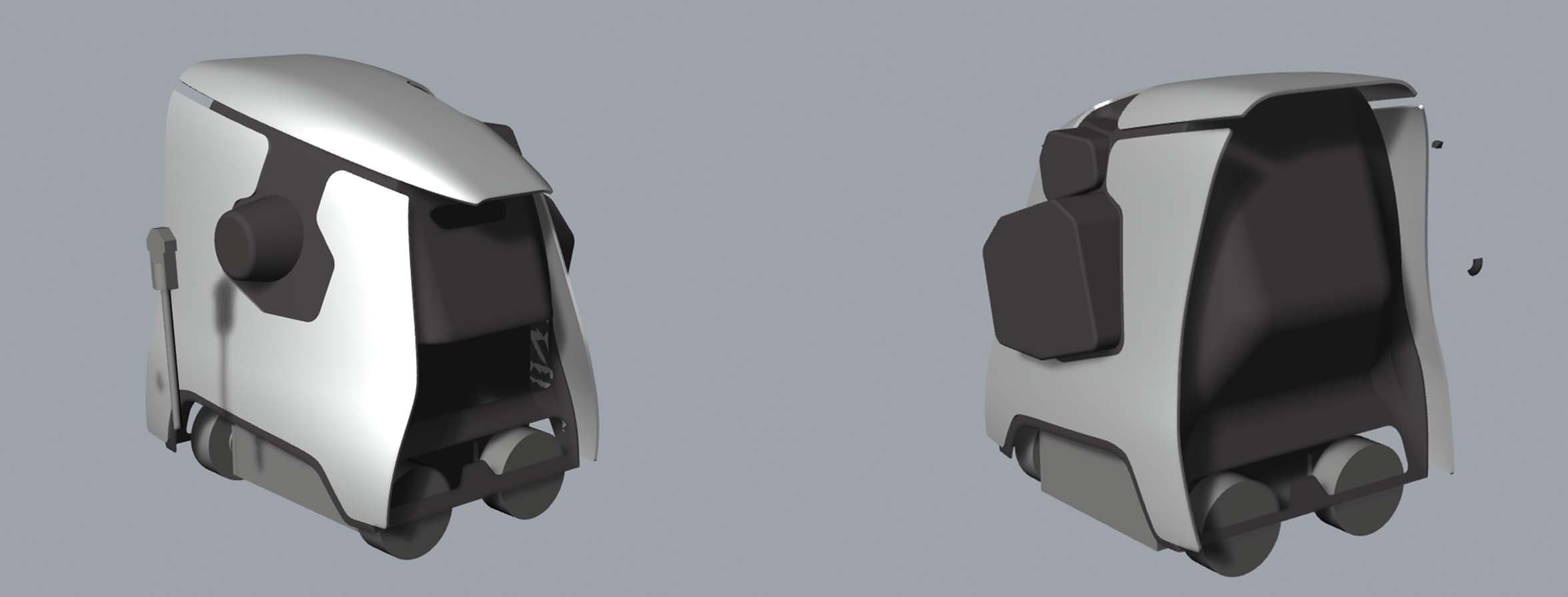
外装カウルを装着したボッチャロボット
