導電性テザー(EDT)
導電性テザー(EDT)システムの周期運動安定解析と制御
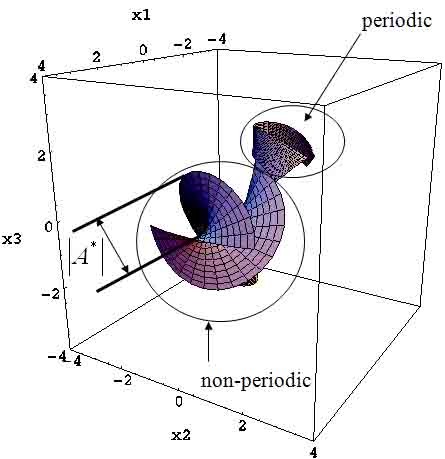
導電性テザーシステムとは複数の衛星をテザーと呼ばれる紐状の構造体で連結した大型柔軟宇宙構造物である. 地球磁場とテザーを流れる電流との干渉によって生じるローレンツ力をアクチュエータとして用いた軌道制御及び姿勢制御による様々なミッションへの適用が期待される一方,テザーの柔軟性によって発生するダイナミクスの不安定性が大きな問題となっており,過去様々な制御手法が提案されてきた. 軌道離心率eが0.35以上においてエレクトロダイナミックテザーシステムはカオス運動を行うことが知られており,また地球磁場軸とシステムの軌道との傾きによってローレンツ力は軌道面外方向へと発生し,より制御を困難なものとしている.カオス運動の制御を目的として,過去様々なカオス制御による周期解への安定化が行われてきた.特に遅延フィードバック制御と呼ばれるカオス制御が有効であると考えられる.その理由は 1.システムが周期解へと安定化された後,入力を必要としないこと 2.遅延フィードバック制御の制御則は非常に単純でありロバスト性に優れ,カオス運動の制御に適していること である.しかしながら,遅延フィードバック制御を用いたとしても,離心率eが0.35以上かつローレンツ力が軌道面外方向に発生する場合,テザーカオス運動の周期解への安定化はいまだ成されていない.そこで本研究ではエレクトロダイナミックテザーシステムの周期解への安定化を目的とし,数値実験による安定性解析及び実験装置による検証を行う. (一部:倉田記念日立科学技術財団 倉田奨励金による研究)
Control Moment Gyro
Control Moment Gyroステアリングにおける予測制御やステアリング角度計画法の研究
Control Moment Gyro(CMG)は宇宙機の三軸姿勢制御に用いられるトルク発生装置である.トルクを発生する原理はReaction Wheel などと同じ角運動量交換によるものであるが、Reaction Wheel よりも発生するトルクが大きい.このため、MIRやISSを初めとする宇宙ステーションなどの大型宇 宙構造物の姿勢制御に用いられてきた.また宇宙望遠鏡などの高機動性を要する用途にも向いており、Hubble Space Telescopeにも搭載されている. このように高出力という利点がある一方、制御において特異点が存在するという深刻な問題がある、システムが特異点に陥ると発生させたいトルクが発生できなくなる.この特異点がCMCを搭載する上での1つの大きな問題である. CMGの特異点回避駆動則に関する研究は大きくsingularity robusi(SR)、 null motionに基づく局所傾斜法、 global avoidanceの3つに分類される.CMGの特異点回避駆動則は多く研究さ れてきた.SR法、nullmotion法ともに特異点を回避する点においては優れた方法であるが、短時間での姿勢整定に向いた方法ではなかった.SRを用いた方法では特異点近傍に近づくと|ヽルクエラーを加えるため発生させたいトルクが発生できない、この状態が特異点から説するまで長時間続くためこの時間が姿勢マヌーバにおいて整定時間を短くすることへの障壁となる可能性がある.また、null motion による局所傾斜法は、特異点から離れるようなジンバルの駆動を局所的な評価関数の傾きから求めているため、常にこの傾きに沿ってジンバルを駆動していった結果、深刻な特異点に陥り姿勢整定が大幅に遅れる可能性もある. そこで本研究では特異点を回避するための明示的な駆動則を組むのではなく、与えられた目的姿勢へ短時間で遷移するような駆動則を組むことでこれらの問題の解決を目指す.平成21年度にはJAXA誘導制御グループと共同研究を実施した. (科学研究費,メカトロニクス技術高度化財団:研究開発助成金およびカシオ財団:研究助成金による研究)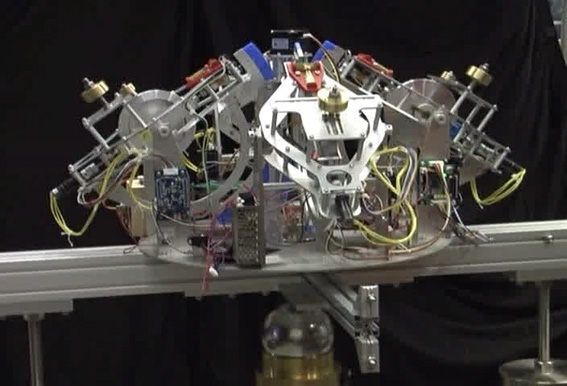
劣駆動宇宙機
劣駆動宇宙機における不連続時間制御手法についての研究
2トルクによる3軸姿勢制御は通常3つのホイールで姿勢制御が行なわれる衛星とは根本的に姿勢制御則が異なる問題であり非ホロノミックな制御問題である.安定化制御手法として、時変フィードック、不連続フィードバック、中心多様体、ゼロダイナミクスによる方法、スライディングモード制御などが提案されてきた.ただし、これまで行われてきた劣駆動システムの制御手法は制御力が可変であることを前提としていたが、スラスタによってトルクを発生する宇宙機の場合、PWPFモジュレータを使用しないかぎり、発生トルクの大きさは一定であるといった実装上の制約がある.もし発生制御トルクが一定であっても、制御可能となる手法が確立されるならば、宇宙機を設計する上で必ず考慮しなければならないフォールトトレランス性に繋がり、宇宙機の構造を簡便にできる効用が期待できる.この研究はこれらのことを目指した制御アルゴリズムの研究である.
月面着陸:安全領域抽出
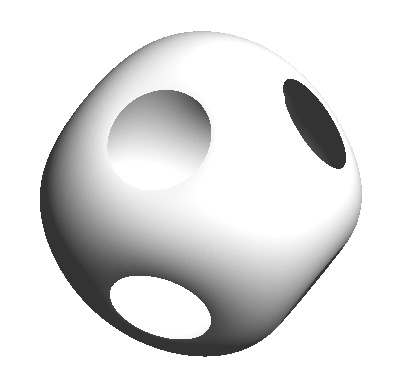
月面画像からの安全着陸領域抽出の研究
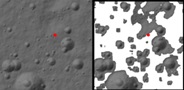
月着陸実験機(SLIM)が安全に着陸できるためには,画像から着陸安全領域を抽出することが必要である.これまでに 画像に含まれる影からクレータ・岩の存在を抽出し,それ以外を着陸安全領域と判定する方法が研究されてきた. それに対し本研究で提案する輝度値を用いる手法は,輝度値から水平度(面の角度の程度)と平坦度(面の凸凹の程度)の両方の条件を満たす着陸可能領域を検出するものである. 仮定した微小画像領域に対し,水平度と平坦度を計算し,その2乗ノルムがある閾値よりも小さければ,その領域は水平かつ平坦,つまり着陸に安全な領域と考えられる. 左下図は,フラクタルモデリングおよびクレータの追加を行ったDEMのCG画像,右下図は与えられた画像から,本提案手法により安全領域と判定された画素を白塗りにした画像である. 本手法を月面着陸実験機に適用できるよう,さらにパラメータの調整等の研究を行うことが今後の課題である.
テザーネット
宇宙デブリ捕獲のためのテザーネットの研究
宇宙デブリ問題が深刻化してきている.宇宙デブリを捕獲する方法としてテザーネットが注目を集めている.テザーネット射出装置の開発,テザーネットの挙動解析(展開,デブリとの衝突,包み込み)を通じて,デブリを効果的かつ確実に捕獲するための射出条件の発見・実験検証を目指す.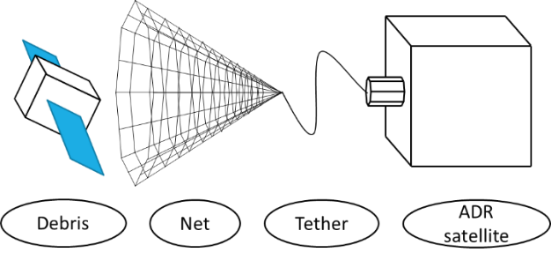 動画
動画
Designed by CSS.Design Sample